Embarking on an internship at Botsync, has proven to be an immersive and enlightening journey, marked by diverse experiences with cutting-edge robotic systems especially in the field of automating Intralogistics. As I delved into my MAG AMR projects involving the Bollore MAG300 Cart Lifter, KEMIN MAG1000 Lifter, CATERPILLAR automation, MAG300 Pallet Jack Tugger Prototype, and the MAG300 Trolley Tugger at SANMINA, each endeavor unfolded a unique set of challenges and learnings. From tackling compatibility issues to refining navigation and overcoming unforeseen obstacles, the internship has been a dynamic blend of innovation, problem-solving, and collaborative international teamwork. I will be working through the intricacies of these projects, highlighting the versatility required in addressing real-world industrial scenarios and the continuous pursuit of excellence in the field of robotics.

Selfie with the MAG1000 Lifter 😄
I delved into my first AMR project at Botsync, focusing on Bolloré's MAG300 Cart Lifter in preparation for multiple client demonstrations and subsequent deployment to Bolloré. This endeavor posed numerous technical challenges, notably in connecting the robot to the Fleet Management Server (FMS) and optimizing its navigation amid persistent errors, requiring continuous troubleshooting. As I was just starting off my internship, the extensive troubleshooting initially felt overwhelming, given my simultaneous learning curve in operating the AMR. Guided by my supervisor and the engineers from India's Botsync Team, I navigated through the challenges, gradually mastering the intricacies of operating and troubleshooting the MAG300 AMR. After persistent troubleshooting and fine-tuning, I successfully executed the MAG300 Cart Lifter's Pick & Place task, a process spanning about two weeks but feeling like a month due to the meticulous debugging. Reflecting on this experience highlighted the pivotal role of effort and determination in achieving success, irrespective of one's initial knowledge. Moreover, the collaboration with diverse teams from different nationalities significantly enhanced my communication skills and teamwork.

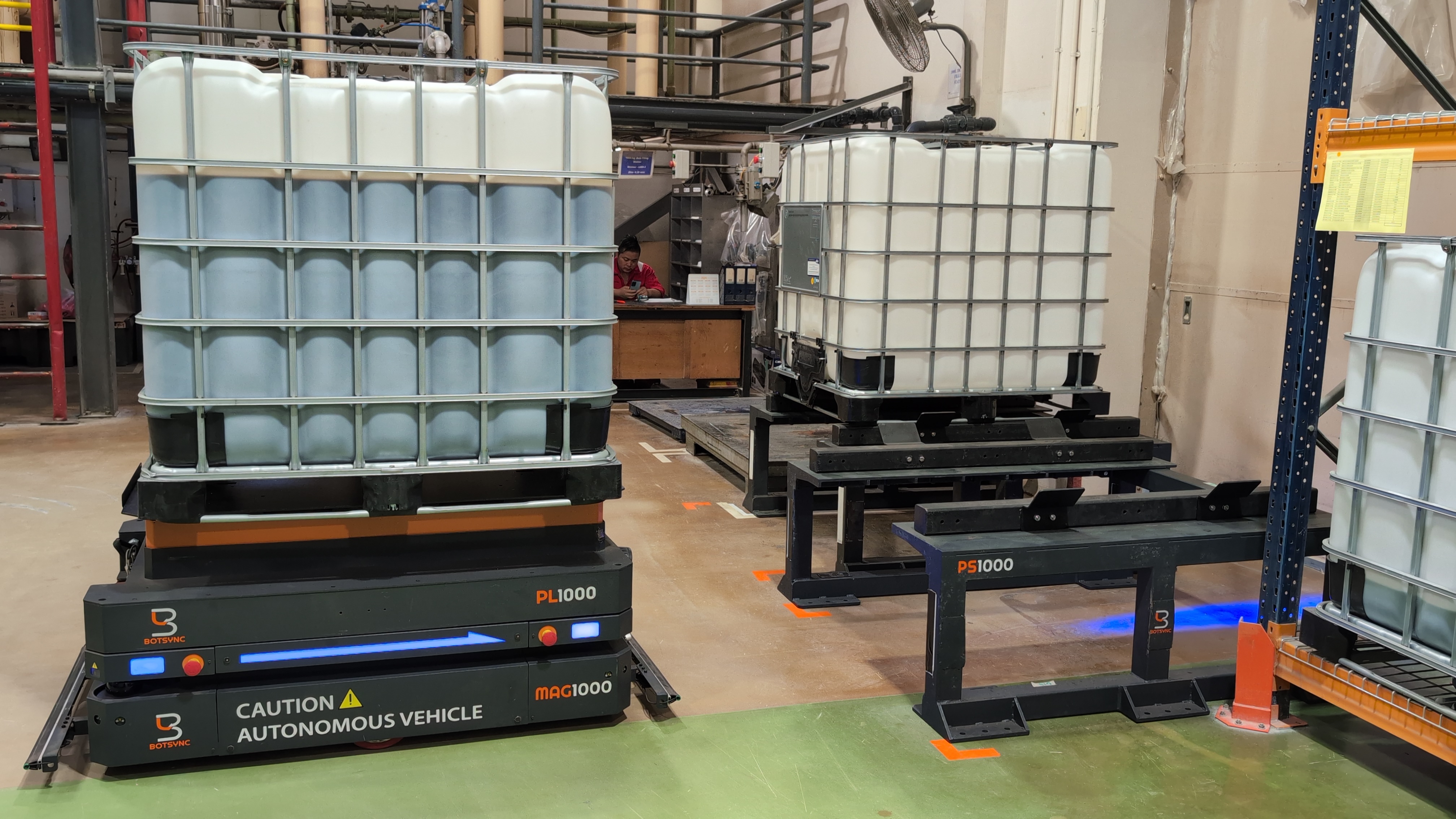
My most extensive project with our Botsync AMRs involved the KEMIN MAG1000 Lifter, spanning from operations, fine-tuning, all the way to deployment. Beginning in the early weeks of my internship, I operated and fine-tuned the MAG1000 for client demonstrations, gaining in-depth insights into its hardware intricacies, including LiDAR, E-Stops, and Depth Camera, as well as the underlying software complexities built on ROS1. This knowledge proved crucial during the deployment at KEMIN, where challenges, particularly with Wi-Fi connectivity and site-specific environmental (objects placed around the warehouse) conditions, highlighted the need for continuous troubleshooting. Recognizing that each deployment introduces unique issues, I realized the utmost importance of fine-tuning, constituting 10% of the deployment process but influencing 80% of the robot's proper functionality. The effort invested in this phase ensured optimal AMR operation in diverse industrial settings. The deployment at KEMIN also involved conducting demonstrations, training sessions for personnel, and implementing safety measures, showcasing the multifaceted approach required for successful integration within the dynamic landscape of an industrial environment.
Engaging in the CATERPILLAR project has been a dynamic and enriching experience, where meticulous planning, hands-on problem-solving, and collaborative teamwork played pivotal roles. From the intricacies of transporting the CAT's MAG1000 robot, including adapting to unforeseen challenges like adjusting waypoints and paths due to conveyor covers, to the precision required in reinstalling crucial attachments and conducting successful demonstrations, each step unfolded a unique set of learnings. The project demanded versatility, from navigating the intricacies of the robot's perception pipeline to fine-tuning safety protocols during V-Marker tests. Moreover, the opportunity to interact with a CATERPILLAR representative, showcase the robot's capabilities, and receive positive feedback underscored the project's success. This experience highlighted the importance of adaptability and continuous testing, ensuring a seamless integration of the MAG1000 into the client's operations. Overall, the CATERPILLAR project has been a journey marked by challenges met with resilience, innovative problem-solving, and the satisfaction of contributing to the advancement of automation solutions in a real-world industrial setting.

My experience working on the MAG300 Pallet Jack Tugger Prototype has been a dynamic journey of innovation and problem-solving. From the intricate design and construction phase involving aluminum extensions, L-Brackets, Hex Screws, and Threaded Sliders to the robust testing and experimentation, each step contributed to refining the prototype's capabilities. Overcoming challenges in navigation, obstacle detection, and fine-tuning the robot's footprint, I delved into the nuances of ensuring seamless autonomy. The integration of the MAG300 with the pallet jack, coupled with navigation tests and obstacle error resolutions, showcased the prototype's evolving proficiency. The exploration of varied turning radii and load tests further honed its capabilities, offering valuable insights for optimization. The culmination of these efforts, especially witnessing the MAG300 autonomously navigate and tug the pallet jack, has been deeply rewarding and speaks volumes about the potential impact of this cutting-edge technology in real-world scenarios.

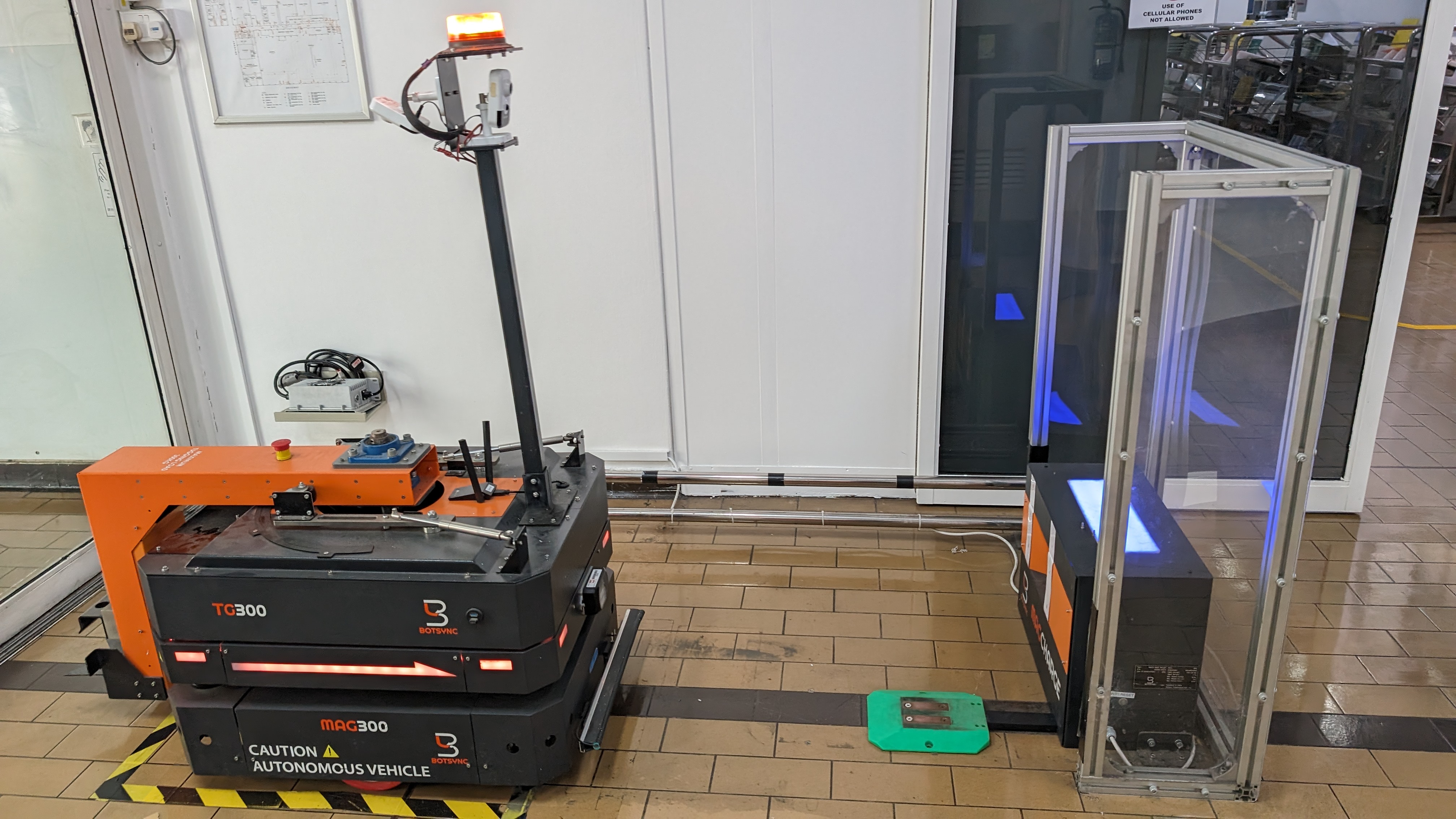
At SANMINA, my experience working on the MAG300 Trolley Tugger was both challenging and rewarding. The troubleshooting began when the robot faced difficulties autonomously navigating to the charging station due to Lidar issues, resulting in a dead battery. During maintenance, we removed the Tugger, documenting the screw locations for future reassembly. Swapping the faulty Lidar and realigning it was crucial for successful navigation. The MAG300's unique features, such as its ability to open automatic sliding doors and execute tasks via a tablet, added complexity. Setting up the charging station demanded meticulous attention, involving Python scripting, debugging, and adjustments to accommodate different charging pad lengths. Overcoming challenges like FMS connectivity issues, undocking glitches, and a malfunctioning charging station showcased the need for collaboration with external engineers. Ultimately, successfully swapping charging stations and conducting rigorous testing ensured the MAG300's seamless functionality, providing valuable insights for future robot deployments. Throughout the journey, I understood the great importance of maintaining robots after its deployment to ensure proper efficiency of its workflows as well as high uptime to satisfy the clients’ needs throughout their usage.
Upon reflection, my internship at Botsync, delving into the intricacies of both the MAG300 and MAG1000 Autonomous Mobile Robots (AMRs), has been an enlightening and multifaceted journey. The challenges faced in preparing for client demonstrations, addressing technical hitches, and optimizing the robots' functionalities provided a comprehensive experience in the field of robotics. Overcoming issues such as compatibility glitches, persistent navigation errors, and debugging hardware connections underscored the dynamic nature of working with cutting-edge technology. The collaborative efforts with the India Botsync Team showcased the significance of teamwork and shared expertise. This internship not only honed my technical skills but also imparted a profound understanding of the adaptive and problem-solving mindset crucial in the ever-evolving realm of autonomous robotics. As I conclude this internship, I carry forward a wealth of knowledge and a deep appreciation for the complexities and rewards of advancing automation solutions in industrial environments.

Group Picture with the Singapore Botsync Team

Wai Yan Min Ko Ko
Hi there! I am a Computer Engineering student at Nanyang Technological University (NTU) and working part-time as Head of Office Staff Assistant Team @HCIBS. With a keen interest in Robotics, AI & IOT, I am constantly seeking new opportunities to expand my experience. If you have any internship opportunities or just want to connect, feel free to contact me!
More Experiences

Participant - Google Data Centre Outreach Hackathon 2025
Coordinating ISC initiatives and community events
Read More →
Membership Secretary of Singapore Polytechnic International Students' Club (SPISC)
Leading ISC's administrative operations and communications
Read More →
Head of Office Staff Assistant (OSA) Team @ HCIBS
Streamlining administrative services and student welfare
Read More →